Zanim zaczniemy tak naprawdę zastanawiać się nad tytułowym pytaniem, przenieśmy się trochę wstecz w czasie. Pierwsza połowa XX wieku przynosi rewolucję zarówno w nauce jak i technice. Pojawiają się kolejne odkrycia naukowe, postępuje rozwój technologii przemysłowych. Zmiany w tych ostatnich wymuszają pierwsze kroki w optymalizacji produkcji. Zaczynają się pojawiać pierwsze układy regulacji o których możemy powiedzieć, że są protoplastami dzisiejszych systemów sterowania. Można powiedzieć, że zaczyna powstawać także automatyka przemysłowa. Ciągle jednak fundamentalnym elementem jest człowiek i to na każdym etapie procesu wytwórczego. Wykonując zarówno prace związane z wykorzystaniem intelektu jak i bardzo proste, a nierzadko ciężkie fizycznie zadania.
Obserwacja zmagań prostego człowieka stała się jedną ze składowych, jaka skłoniła czeskiego pisarza, Karola Capka, do napisania sztuki R.U.R. (Rossumovi Univerzální Roboti). W niej to, po raz pierwszy w takim kontekście, wykorzystane zostało słowo robot, będące przekształceniem wyrazu robota, a oznaczające wykonywanie ciężkiej pracy związane z dużym wysiłkiem. Czytając, wydaną w 1920 roku sztukę, możemy być zaskoczeni faktem, że ów robot to tak naprawdę – używając dzisiejszych określeń – pewna forma androida. Były to uproszczone ale jednak żywe istoty dedykowane do wykonywania ciężkich prostych prac. Oczywiście ich wizja była na miarę ówczesnych czasów, ale jednak dała pewnego rodzaju wstęp do określenia funkcjonalności przyszłych maszynowych wersji robota.
Wizje nowego świata zaczynają się coraz szerzej pojawiać w powstającej literaturze science-fiction. Równolegle z pokojowym czyli pozytywnym zastosowaniem robotów, twórcy roztaczają coraz bardziej złowieszcze obrazy maszyn atakujących ludzkość. I to nie tylko pochodzących z innych układów planetarnych, ale i naszych własnych, których wewnętrzna inteligencja doprowadziła do buntu i przeciwstawieniu się ich wykorzystywaniu do pracy na rzecz człowieka. Odpowiedzią na taki negatywny obraz przyszłości staje się wydana w 1942 nowela „Zabawa w berka” (Runaround) Isaaca Asimova. Po raz pierwszy sformułowane w niej zostają prawa, sankcjonujące przyszłe relacje między człowiekiem a robotem:
1. Robot nie może skrzywdzić człowieka, ani przez zaniechanie działania dopuścić, aby człowiek doznał krzywdy.
2. Robot musi być posłuszny rozkazom człowieka, chyba że stoją one w sprzeczności z Pierwszym Prawem.
3. Robot musi chronić samego siebie, o ile tylko nie stoi to w sprzeczności z Pierwszym lub Drugim Prawem.
W kolejnym opowiadaniu Roboty i Imperium (Robots and Empire) Asimov dodał prawo zerowe, które stało się nadrzędne wobec trzech pozostałych:
0. Robot nie może skrzywdzić ludzkości, lub poprzez zaniechanie działania doprowadzić do uszczerbku dla ludzkości.
Warto w tym miejscu zwrócić uwagę, że realizacja tych zasad zakłada daleko idącą inteligencję i świadomość podejmowanych przez roboty decyzji. Wymusza zatem wyposażenie każdego z nich w bardzo rozwinięty nie tylko system sensoryczno-wykonawczy ale i przed wszystkim układ obliczeniowy na miarę ludzkiego mózgu. Tak to widzieli pisarze, można powiedzieć naukowi fantaści ale i wizjonerzy przyszłych zmian. Zmian, które – patrząc na literaturę – mogą przynieść także pewne ryzyko dla ludzi. Czy zatem faktycznie mamy się bać robotów?
Powróćmy do realnego świata XX wieku. Wizje rozwijają się znacznie szybciej niż technika i technologia. Rok 1947 przynosi pierwszą działającą konstrukcję tranzystora, a do zbudowania nawet najmniejszej kopii, potrzeba ich miliony. Czy mamy szansę na realizację pomysłów? Ludzkość – mimo różnych trudności – przyspiesza w realizacji śmiałych koncepcji. To doprowadza m.in. do stworzenia w 1958 prototypu, a w 1961 pierwszej instalacji seryjnego robota Unimate w zakładach General Motors, przekładającego gorące odlewy w procesie hutniczym. Można powiedzieć, że era robotyki stała się faktem.
Przez kolejne dekady, nowopowstające konstrukcje oznaczają się przede wszystkim dużymi rozmiarami oraz masą własną. Dedykowane do ciężkich, powtarzalnych procesów, wykonują swoje zadania w sposób powtarzalny i coraz bardziej precyzyjny. Równolegle z rozwojem samej maszyny, rozwija się technologia czujników. Pojawiają się pierwsze kamery, czujniki siły i obecności. Niestety ich dokładność nie pozwala na zastosowanie ich do wykrywania człowieka w pobliżu pracującego robota. Pierwsze normy z zakresu bezpieczeństwa nakładają konieczność instalacji specjalnych klatek i osłon, po których otwarciu musi nastąpić bezwarunkowe zatrzymanie wszelkich ruchów. Warto zwrócić tu uwagę, iż takie rozwiązania mają za zadanie chronić człowieka niejako przed nim samym. Fizycznie separujemy go od pracującego urządzenia, uniemożliwiając mu wejście w obszar roboczy. Praktyka tych instalacji pokazuje, że pomysłowość operatorów nie zna granic. Znane są przypadki znoszenia blokad by ułatwić sobie dostęp. Niestety niektóre z nich skończyły się tragicznie. Czy więc jest to kolejny przykład, że roboty stanowią zagrożenie?
Wspomniane konstrukcje, spełniające oczywiście swoje zadania w bardzo uciążliwych i ciężkich pracach, były i są dalekie od ideału. Konieczność zabezpieczeń generuje bardzo wysokie koszty instalacyjne. Każda zmiana zastosowania takiego robota wiąże się z kolejnymi wysokimi nakładami, co czyni elastyczność takiego systemu praktycznie zerową. Dlatego też systemy realizowane w takiej technologii stały się domeną bardzo dużych zakładów dysponujących zasobami finansowymi i możliwościami postawienia robota w jednym, dedykowanym i powtarzalnym celu.
Wykładniczy wręcz rozwój elektroniki w ostatniej dekadzie XXw i na początku bieżącego otworzył szereg fantastycznych możliwości także w zakresie szeroko pojętych robotów. Bo przecież wsparcie dla pracy człowieka to nie tylko fabryka ale i wiele zadań dnia codziennego. Połączenie potrzeb i nowych technologii zaowocowało powstaniem tworu nazwanego robotem kolaboratywnym. Pojęcie to określa robota, którego właściwości dynamiczne, konstrukcja układu sterowania oraz wbudowany system bezpieczeństwa, pozwalają na bezpieczną współpracę z człowiekiem, bez stosowania dodatkowych środków ochrony.
Jedne z pierwszych realizacji dotyczyły urządzeń wspomagających człowieka na co dzień. Patrząc na ofertę wielu sklepów AGD można zauważyć wszechobecne roboty sprzątające. Mimo że odbiegają od przemysłowego wzorca, są jednak autonomicznymi urządzeniami wykonującymi zadania odkurzania i zbierania leżących śmieci. Choć z pozoru są to dość proste zajęcia, to algorytm definiujący trajektorię jest bardzo zaawansowany i można by powiedzieć że stanowi pewną formę sztucznej inteligencji. Autor miał okazję zweryfikować adaptację takiego robota do różnych pomieszczeń i przeszkód, z bardzo pozytywnym skutkiem. Czy było zagrożenie podczas pracy? Żadnego, przecież nie miał zamontowanych narzędzi, pracował na niskie napięcie, miał okrągły kształt, czujniki sygnalizowały przeszkodę. Czy więc da się przenieść taką koncepcję do przemysłu? Czy jest możliwa taka konstrukcja do wykorzystania w fabryce?
Połowa pierwszej dekady XXI wieku przyniosła pierwsze rozwiązania robotów kolaboratywnych dla przemysłu. Podstawowymi założeniami ich konstrukcji były:
– zaokrąglone kształty obudowy oraz bezpieczne odległości między członami
– wbudowany system bezpieczeństwa oparty o kontrolę nacisku
– programowe funkcje bezpieczeństwa
– łatwa obsługa
– proste i intuicyjne programowanie
W oparciu o taką definicję zaczęły powstawać pierwsze koboty (colaborative robots) i pojawiły się pierwsze ich zastosowania. I tu pojawiło się pytanie – czy tak skonstruowany robot daje pełnię bezpieczeństwa? W każdym przypadku – czy to robota klasycznego czy kobota – należy zachować środki ostrożności. To co je odróżnia, to zdolność tego drugiego do reakcji na czynniki zewnętrzne i błędy aplikacyjne. W przypadku typowego robota, błąd w instalacji, dopuszczenie człowieka w obszar roboczy może skutkować poważnymi uszkodzeniami ciała. W przypadku kobotów spełniających wymagania normy ISO/TS 15066, podczas kolizji, czujniki siły wykryją zwiększoną siłę oporu (w zależności od miejsca od 50 do 100N) i spowodują natychmiastowe zatrzymanie. Czy jednak to wystarczy by powiedzieć że jest bezpiecznie? To tylko jeden z elementów całej układanki, nazywanej aplikacją, która to – w oparciu o najnowszą wersję normy 10218:2025 – musi być „kolaboratywna” jako całość. Integrator musi dopilnować by użyte narzędzie było odpowiednio ukształtowane, by było również wyposażone w system oceny siły. Jednym z elementów całego projektu jest ocena ryzyka. Jest to proces, który zaczyna się na etapie projektowania i kończy w momencie uruchomienia gotowego urządzenia. Wynikiem takiej oceny jest specyfikacja potencjalnych zagrożeń, które mogą wynikać z niewłaściwej eksploatacji całej aplikacji. Zastosowanie wbudowanych systemów bezpieczeństwa, powoduje, że stanowią one jedynie ułamek tego, co mogą stwarzać tradycyjne roboty.
Jakie jeszcze benefity możemy osiągnąć, stosując tę technologię? Poprzez swoje właściwości, koboty stają się idealną odpowiedzią na wymagania małych i średnich przedsiębiorstw. Są lekkie i dynamiczne w swoich operacjach. Pozwala to na zastosowanie ich w adaptacyjnej, elastycznej produkcji. Warto zwrócić uwagę, ze podstawą współczesnego Przemysłu 4.0 jest dopasowanie do indywidualnych potrzeb odbiorców. Dzięki łatwości programowania, przy jednoczesnej eliminacji barier wynikających z bezpieczeństwa, koboty mogą być z łatwością przenoszone pomiędzy stanowiskami na których wymagane jest wparcie człowieka. Jest to olbrzymia wartość dodana, otwierająca niemal nieograniczone możliwości aplikacyjne, podnoszące wydajność i jakość przy jednoczesnym spadku kosztów. Można postawić pytanie – jak się ma efektywność – czytaj szybkość – do bezpieczeństwa? Jeśli do spełnienia oczekiwań biznesowych wymagana jest prędkość większa niż wynikająca z deklaracji bezpieczeństwa, to zawsze można wyposażyć kobota i jego otoczenie w odpowiednie skanery czy czujniki obecności. Pozwolą one – po wykryciu pojawienia się człowieka w przestrzeni roboczej – na zwolnienie ruchów kobota do takiego stopnia by były one bezpieczne. Po ustaniu przeszkody, całość wróci do poprzedniej, zadanej dynamiki. Wspomniana wcześniej ocena ryzyka, może być podstawą do określenia w jakich warunkach i jakie wartości mają przyjąć parametry ruchowe w normalnej i bezpiecznej sytuacji. Dzięki temu zyskujemy efektywne wsparcie dla operatora, bez zmniejszania poziomu bezpieczeństwa.
Operator. Mówiąc o kobotach, nie można pominąć jego obecności w procesie. Tradycyjne zastosowania robotów tworzyły – poprzez swoją konstrukcję – olbrzymią barierę między maszyną a człowiekiem. Zniesienie ograniczeń w postaci klatek, pozwoliło na jej eliminację i otworzyło drogę do pewnego rodzaju symbiozy. Oczywiście ciągle dalecy jesteśmy od futurystycznych wizji twórców SF, ale przeprowadzone badania pokazały, że taka forma kobota zyskała dobre przyjęcie wśród użytkowników. W jednym z uniwersytetów w USA testowano trzy zakłady przemysłowe (dwa małe, jeden duży) wykorzystujące kilkanaście kobotów. Badano opinie zarówno operatorów jak i służb utrzymania ruchu oraz kardy zarządzającej. Operatorzy relatywnie szybko przekonali się, że nowe urządzenia nie stanowią dla nich konkurencji a wręcz przeciwnie – pozwalają osiągać lepsze efekty w pracy. Co więcej, zaczęły się pojawiać relacje podobne do relacji z kolegą z pracy. Koboty zyskiwały imiona, były partnerem do rozmów (raczej jednostronnych jeszcze ale zawsze) i były również obiektem troski w sytuacjach awaryjnych. Można powiedzieć, że wkomponowały się w załogę zakładu.

Dla służb utrzymania ruchu, pojawienie się kobotów było większym wyzwaniem. Trzeba było opanować nie tylko obsługę bieżącą ale również przezbrojenia w przypadkach modyfikacji profilu produkcji. Z początku wydawało się, że może to stanowić problem i przeszkodę, ale dla zdecydowanej większości techników i inżynierów, poznanie kobotów stało się bardzo interesującym celem we własnym rozwoju. Dzięki temu, po dość krótkim przeszkoleniu, służby te potrafiły nie tylko zapanować nad zmianami, ale i wyposażać swoje koboty w mechanizmy podpowiadające operatorom co robić jeśli wystąpi awaria.
Pozytywne przyjęcie przez zespoły produkcyjne, dały impuls dla zarządzających do zwiększenia inwestycji w taką formę automatyzacji produkcji. Dla nich elastyczność i efektywność w połączeniu z łatwością obsługi i konfiguracji była olbrzymią zaletą. Znajduje to wymiar w rosnącym udziale instalacji kobotów. O ile jeszcze w 2015 stanowiły one około 20% wszystkich systemów robotowych, o tyle w 2025 szacowany ich udział zwiększy się do prawie 70%. Znaczący wpływ mają także ceny instalacji. Ich zmiana powoduje, że w ciągu ostatnich 8 lat zwrot z inwestycji spadł z 5-7 lat do nieco ponad 1 roku. Pamiętać należy, że sam kobot, nawet wyposażony w odpowiednie narzędzie czy chwytak, nie wystarczy do osiągnięcia właściwego efektu. Jednym z typowych błędów jest założenie, że można go postawić w miejscu w którym pracował człowiek i w zasadzie sprawa jest załatwiona. Tu jednak po raz kolejny musimy odwołać się do futurystycznych koncepcji twórców SF. Adaptacyjność i zdolności analityczne dzisiejszych kobotów – mimo rozwoju technologii – są jednak ograniczone. Oznacza to że musimy go wyposażyć nie tylko w szereg układów sensorycznych (jak kamery czy czujniki obecności) ale także przygotować mu odpowiednio miejsce do działania.
Dopasowanie linii technologicznej do wykorzystania kobotów stanowi czasem nie lada wyzwanie. Można by w zasadzie uznać, że może być to główne zadanie dla integratora. Oczywiście, dzięki samej konstrukcji kobota, jest to do zrealizowania (czego bardzo często nie dało się wykonać przy użyciu klasycznych robotów), ale wymaga przemyślanych ruchów. Miejsce pobierania produktu, prędkość i jego orientacja są bardzo istotne by prawidłowo przejąć element przez kobota. Podobnie w drugą stronę, po wykonaniu zadania, należy przygotować odpowiednie miejsce do odłożenia detalu.
Warto przyjrzeć się pod tym kątem zastosowaniom kobotów w przekroju różnych branż przemysłu. W bardzo wielu wypadkach, operator np. zgrzewarki dostawał preprodukty ułożone w stojaku po czym odkładał je na podobne miejsce. Idealne do zastosowania kobota, bez specjalnych zabiegów. Zmiana rodzaju zgrzewu czy układu punktów to szybkie przeprogramowanie i można kontynuować prace. Dzisiaj około 50% instalacji znajduje zastosowanie właśnie w tym segmencie, w którym większość produkcji jest układana bądź w kuwetach bądź w tackach lub specjalnych pudełkach. To ułatwia orientację i organizowanie pracy.
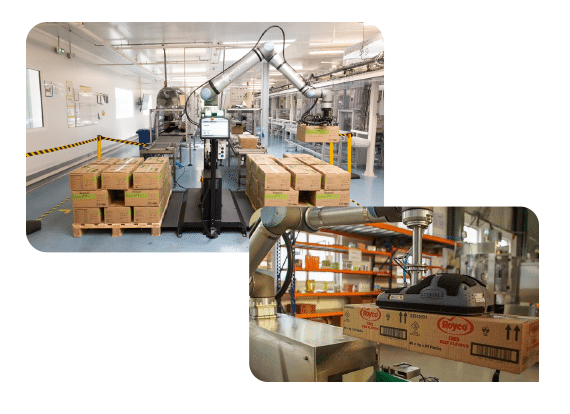
Można powiedzieć że uniwersalnym zastosowaniem jest proces pakowania i paletyzacji. Tu sam produkt nie ma znaczenia, a proces jest bardzo podobny w każdej branży. Istotne w przypadku pakowania jest zwrócenie uwagi na dobór chwytaka i ułożenie produktów przed kobotem. Może się okazać, że pakowanie po 2 lub 3 produkty jest bardziej optymalne czasowo. Układanie na palecie wymaga także pewnych modyfikacji stanowiska, zarówno w zakresie samej palety jak i np. organizacji magazynu buforowego wykorzystywanego przy zmianie palet. Możemy mnożyć kolejne przykłady zastosowań, a z każdym miesiącem przybywa coraz to ciekawszych rozwiązań takich jak koboty inspekcyjne na stanowiskach kontroli jakości.
Na zakończenie warto wrócić jeszcze raz do społecznego aspektu stosowania kobotów. Wcześniej wspomniałem bardzo pozytywnym przyjęciu nowych „kolegów” zarówno przez operatorów jak i służby utrzymania ruchu. Czy zatem pytanie o zagrożenie zmniejszanie miejsc pracy jest zasadne? Okazuje się że w obecnym czasie już nie. Koboty zastępują człowieka w prostych monotonnych pracach, nie wymagających kwalifikacji. Poziom wykształcenia społeczeństwa rośnie i to nie tylko w krajach rozwiniętych ale i rozwijających się. Stosowanie nowych technologii w życiu codziennym powoduje, że chcemy się edukować i m.in. dzięki temu pracodawcy zyskują coraz szersze możliwości rozwoju zakładów. Analizując strukturę zapotrzebowania na pracowników, można od kilku lat zauważyć rosnącą liczbę wolnych etatów na takie właśnie miejsca. Jednak ten trend się już się powoli zmienia, właśnie dzięki postępującej automatyzacji i kobotyzacji przemysłu. Wkrótce (szacunki mówią o 2025-2030) takie stanowiska powinny w znaczący sposób zostać zredukowane.
Czy trzeba się bać robotów? Myślę że po lekturze odpowiedź będzie prosta. Dzisiejsza technologia odpowiednio i przemyślanie zastosowana, zaowocuje nie tylko sukcesem ekonomicznym ale i społecznym.
Rafał Tutaj
www.sterowniki.pl